




中國の科學者、本物に近い電子皮膚システムを開発
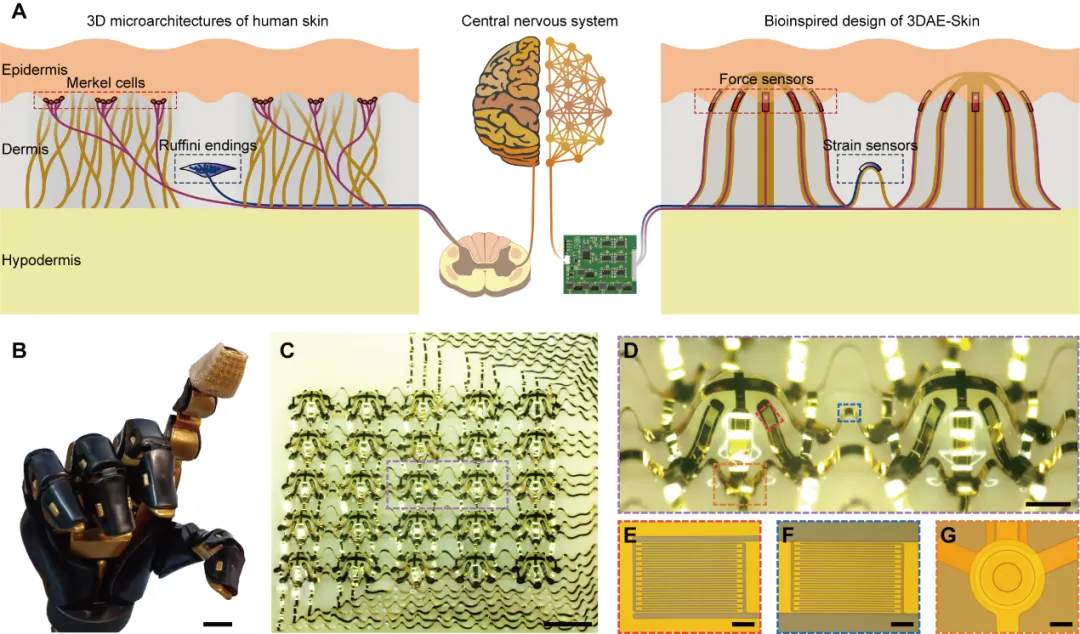
3次元構造を持つ電子皮膚:生體模倣設計のコンセプトと実際の裝置の畫像。図Aは電子皮膚の生體模倣設計のコンセプト。図Bはロボットハンドの指先に貼られた電子皮膚。図C-Gは電子皮膚の寫真、力覚センサーユニット、応力センサーの局部の拡大図、応力グリッド線とバイアホールの局部の拡大図。畫像出典:清華大學
清華大學が5日に明らかにしたところによると、同大學宇宙航空學院の柔軟性電子技術実験室の張一慧教授のチームは、生體模倣3次元アーキテクチャを備えた新型電子皮膚システムを革新的に開発した。物理的なレベルで圧力、剪斷力、応力など複數種類の機械信號を同時に読み取り、感知することができる。圧力位置への知覚分解能は約0.1mmで、本物の皮膚に近い。この科學研究成果は世界初で、関連論文は國際的學術誌「サイエンス」最新號に掲載された。
この3次元電子皮膚は皮膚の構造と類似し、「表皮」「真皮」「皮下組織」から構成される上、各層の有効體積弾性率は人の皮膚の対応する層に近い。センサーと回路は主に「真皮」に位置し、うち力覚センサーユニットは8本カゴ狀構造。センサーはカゴ狀構造の上部に位置し、電子皮膚の表面に近いため、外部の作用力に対して非常に敏感だ。応力センサーは裝置底部のアーチ構造上にあり、垂直の高度で力覚センサーユニットの上部のセンサーと一定の距離を保つため、対面の引張応力変形のみに敏感で、圧力の干渉をほぼ受けない。
研究者はこの3次元構造を持つ電子皮膚に基づき、ディープラーニングアルゴリズムと深く結びつけ、タッチだけで物體の體積弾性率と局部の主曲率を同時に測定できる先進的な觸覚システムを開発した。その食べ物の鮮度の判別などの実際のシーンにおける応用例を示し、物理量の定量測定(摩擦係數など)やマンマシンインタラクションなどでの応用のポテンシャルを示した。(編集YF)
「人民網日本語版」2024年6月6日
注目フォトニュース




関連記事
掲載された記事、寫真の無斷転載を禁じます。
Tel:日本(03)3449-8257 Mail:japan@people.cn
